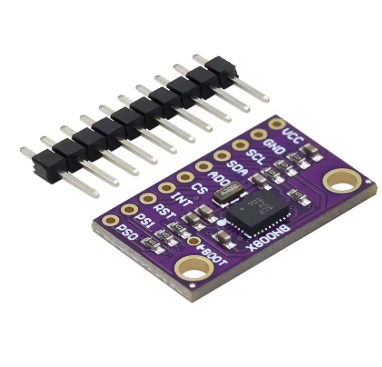
Gy-bno085 BNO085 AR VR IMU Módulo de Sensor AHRS de 9 ejes, alta precisión
Gy-bno085 BNO085 AR VR IMU Módulo de Sensor AHRS de 9 ejes, alta precisión
El BNO080 / 085 es un sistema en paquete (SiP) de 9 ejes para el rápido desarrollo de la realidad aumentada (AR), la realidad virtual (VR), la robótica y los dispositivos IoT habilitados para sensores.Co-desarrollado por Bosch and Hillcrest Labs, cuenta con acelerómetros, magnetomómetros y giroscopios de alto rendimiento en una MCU ARM Cortex M0 + de 32 bits de bajo consumo en un paquete pequeño.Freespace de Hillcrest® El software del concentrador del sensor está preintegrado en el BNO080 / 085 para proporcionar un seguimiento de movimiento superior de 9 y 6 ejes.Permite aplicaciones de sensores emocionantes en una variedad de productos de consumo e IoT
El BNO080 / 085 ofrece configuración, funcionalidad y rendimiento específicos de la aplicación en un pequeño ensamblaje llave en mano que beneficia a los OEM al reducir el tiempo de comercialización, el tiempo de desarrollo y los costos de BOM, además de proporcionar el más alto nivel de precisión y calidad.
La VR IMU utiliza la impresionante IMU BNO080.Este IC cuenta con una combinación de acelerómetro/giroscopio/maganómetro de 3 ejes que funciona con ARM Cortex M0 + que ejecuta potentes algoritmos.La unidad de medición inercial (IMU) BNO080 genera encabezados vectoriales de rotación precisos, ideales para aplicaciones de realidad virtual y otras aplicaciones de encabezado, con errores de rotación estática de 2 grados o menos.Esto es lo que hemos estado esperando: todos los datos del sensor combinados y corregidos en información IMU significativa y precisa.
El IC está diseñado para implementarse en un teléfono basado en Android para manejar todos los cálculos necesarios para las gafas de realidad virtual utilizando solo su teléfono.La funcionalidad del sensor es muy potente y la potencia es compleja.Se proporciona una biblioteca basada en I2C que proporciona vectores de rotación (que la mayoría de las personas desean leer desde la IMU), así como lecturas de aceleración, giroscopio y magnetomómetro, recuento de pasos, clasificador de actividades (por ejemplo,ciclismo) y calibración.
VR IMU ha creado una aplicación de procesamiento de demostración para ver cómo el movimiento de IMU puede manipular con precisión objetos 3D utilizando la salida de cuatrión de IMU.
Si I2C no es su primera opción de comunicación, el sensor también es capaz de comunicarse vía SPI y UART.Si está utilizando un UART, le recomendamos que utilice Serial Basic para una fácil conexión.
Esta versión utiliza un cristal integrado de 32 kHz para una mayor precisión y timestamps más precisos.
Características
Interfaces:
El BNO080 puede comunicarse a través de una variedad de interfaces.Qwiic VR IMU tiene dos puentes que permiten al usuario seleccionar su interfaz de elección.
I2C (predeterminado): hasta 400 kHz
SPI: Hasta 3MHz
UART: 3Mbps
UART-RVC (aspiradoras robóticas):115200kbps
Características de rendimiento:
Vector de rotación
Error dinámico: 3,5°
Error estático: 2,0°
Vector de rotación de juegos
Error dinámico: 2,5°
Error estático: 1,5°
Deriva de dirección: 0,5° / min
Vector de rotación geomagnética
Error de rotación dinámica: 4,5°
Error de rotación estática: 3.0°
Error de ángulo de gravedad: 1,5°
Precisión de aceleración lineal: 0,35 m/s2
Precisión del acelerómetro: 0,3 m/s2
Precisión del giroscopio: 3.1° /seg.
Precisión del magnetómetro: 1,4 ?T
Reseñas de producto (0)
Productos relacionados